Royal Canadian Navy ASDIC anti-submarine SONAR
ASDIC anti-submarine sonar
A fair number of RCN warships sailed in and out Maritime ports during the Second World War. Many of them served on convoy escort duties, and a good number of them engaged German U-boats on a fairly regular basis. To aid in the hunt for these U-boats, underwater detection capability on a variety of RCN warships was provided by a fixed ASDIC dome; this was later modified to be retractable. Subsequent inventions such as the High Frequency Radio Detection Finder(Huff-Duff) were later added, along with various radar systems (such as the Type 271), which proved particularly effective in low-visibility conditions in the North Atlantic. There is a Canadian connection to the development of ASDIC.

Officers examining Asdic installation in HMCS Acadia, November 1940. (Library and Archives Canada Photo, MIKAN No. 3566771)
In 1916, under the British Board of Invention and Research, Canadian physicist Robert William Boyle took on the active sound detection project with A.B. Wood, producing a prototype for testing in mid-1917. This work for the Anti-Submarine Division of the British Naval Staff was undertaken in utmost secrecy, and used quartz piezoelectric crystals to produce the world's first practical underwater active sound detection apparatus. To maintain secrecy, no mention of sound experimentation or quartz was made – the word used to describe the early work ("supersonics") was changed to "ASD"ics, and the quartz material to "ASD"ivite: "ASD" for "Anti-Submarine Division", hence the British acronym ASDIC. In 1939, in response to a question from the Oxford English Dictionary, the Admiralty made up the story that it stood for "Allied Submarine Detection Investigation Committee", and this is still widely believed, though no committee bearing this name has been found in the Admiralty archives.
By 1918, Britain and France had built prototype active systems. The British tested their ASDIC on HMS Antrim in 1920 and started production in 1922. The 6th Destroyer Flotilla had ASDIC-equipped vessels in 1923. An anti-submarine school HMS Osprey and a training flotilla of four vessels were established at Portland in 1924.
By the outbreak of the Second World War, the Royal Navy had five sets for different surface ship classes, and others for submarines, incorporated into a complete anti-submarine system. The effectiveness of early ASDIC was hampered by the use of the depth charge as an anti-submarine weapon. This required an attacking vessel to pass over a submerged contact before dropping charges over the stern, resulting in a loss of ASDIC contact in the moments leading up to attack. The hunter was effectively firing blind, during which time a submarine commander could take evasive action. This situation was remedied with new tactics and new weapons.
The tactical improvements developed by Frederic John Walker included the creeping attack. Two anti-submarine ships were needed for this (usually sloops or corvettes). The "directing ship" tracked the target submarine on ASDIC from a position about 1500 to 2000 yards behind the submarine. The second ship, with her ASDIC turned off and running at 5 knots, started an attack from a position between the directing ship and the target. This attack was controlled by radio telephone from the directing ship, based on their ASDIC and the range (by rangefinder) and bearing of the attacking ship. As soon as the depth charges had been released, the attacking ship left the immediate area at full speed. The directing ship then entered the target area and also released a pattern of depth charges. The low speed of the approach meant the submarine could not predict when depth charges were going to be released. Any evasive action was detected by the directing ship and steering orders to the attacking ship given accordingly. The low speed of the attack had the advantage that the German acoustic torpedo was not effective against a warship travelling so slowly. A variation of the creeping attack was the "plaster" attack, in which three attacking ships working in a close line abreast were directed over the target by the directing ship.
The new weapons to deal with the ASDIC blind spot were "ahead-throwing weapons", such as Hedgehogs and later Squids, which projected warheads at a target ahead of the attacker and still in ASDIC contact. These allowed a single escort to make better aimed attacks on submarines. Developments during the war resulted in British ASDIC sets that used several different shapes of beam, continuously covering blind spots. Later, acoustic torpedoes were used.
Early in the Second World War (September 1940), British ASDIC technology was transferred for free to the United States. Research on ASDIC and underwater sound was expanded in the UK and in the US. Many new types of military sound detection were developed. These included sonobuoys, first developed by the British in 1944 under the codename High Tea, dipping/dunking sonar and mine-detection sonar. This work formed the basis for post-war developments related to countering the nuclear submarines. (W. Hackmann, Seek & Strike: Sonar, anti-submarine warfare and the Royal Navy 1914–54 (HMSO, London, 1984).
(ADA-DAP Photo)
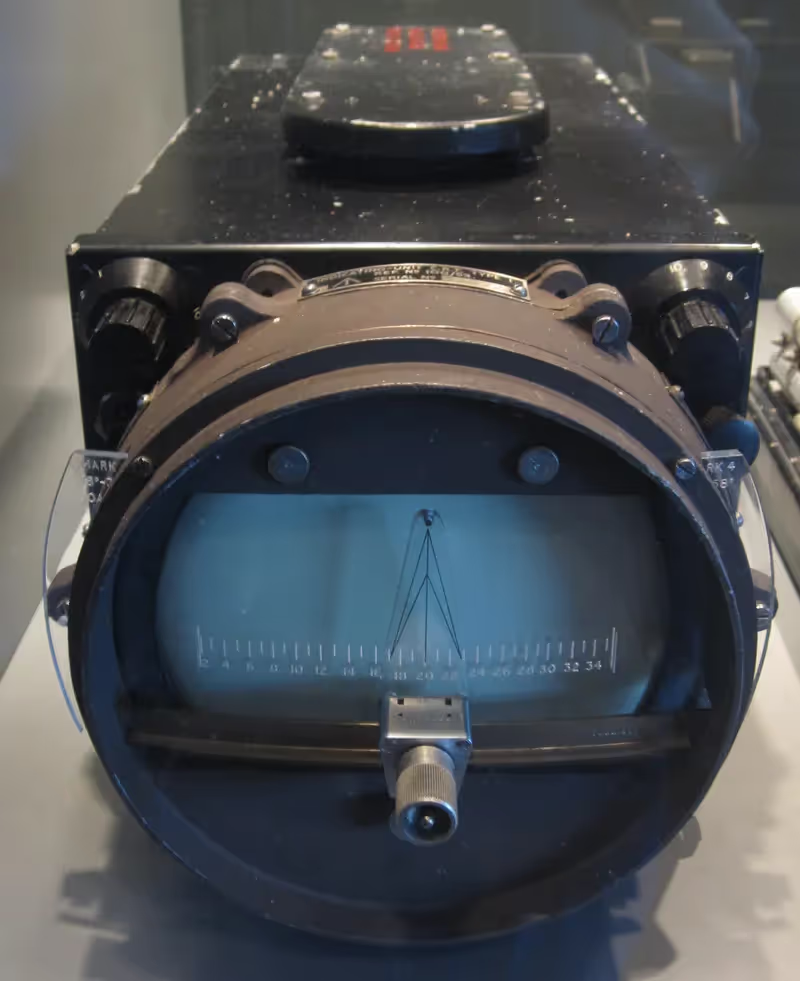
ASDIC display unit, c1944.
In 1946 Time magazine reported on the development of ASDIC in Canada, noting that 4,800 ASDIC sonar devices were secretly manufactured at Casa Loma, Toronto, during the Second World War. (Canada: "Stable Sonics", Time, 28 October 1946)

(Library and Archives Canada Photo, MIKAN No. 3455875)
R. Cosburn and Lieutenant F.A. Beck (right) at the Asdic set on the bridge of HMCS Battleford, Sydney, Nova Scotia, November 1941.

(Library and Archives Canada Photo, MIKAN No. 3205248)
Depth charges explode astern of an RCN frigate during trials, January 1944.

(Library and Archives Canada Photo, MIKAN No. 3394476)
Hedgehog array onboard HMCS North Bay, October 1943.
The Hedgehog (also known as an Anti-Submarine Projector) was a forward-throwing anti-submarine weapon that was used primarily during the Second World War. The device, which was developed by the Royal Navy, fired up to 24 spigot mortars ahead of a ship when attacking a U-boat It was deployed on convoy escort warships such as corvettes and destroyers to supplement the depth charges.
As the mortar projectiles employed contact fuzes rather than time or barometric (depth) fuzes, detonation occurred directly against a hard surface such as the hull of a submarine making it more deadly than depth charges, which relied on damage caused by hydrostatic shockwaves. During the Second World War, out of 5,174 British depth charge attacks there were 85.5 kills, a ratio of 60.5 to 1. In comparison, the Hedgehog made 268 attacks for 47 kills, a ratio of 5.7 to 1. (Wikipedia)

(Library and Archives Canada Photo, MIKAN No. 3520751)
View from HMCS Kootenay, which has fired Hedgehog charges during the action in which Escort Group 11 sank the German submarine U-621, 18 August 1944. HMCS Ottawa is visible in the background.

(RCN Photo)
ML Q050 Fairmile Type B Motor Launch. The large black flag indicates Q050 is conducting radio asdic contact training during anti-submarine exercises in May 1943.
Underwater detection capability jon a variety of RCN warships was provided by a fixed ASDIC dome; this was later modified to be retractable. Subsequent inventions such as the High Frequency Radio Detection Finder (Huff-Duff) were later added, along with various radar systems (such as the Type 271), which proved particularly effective in low-visibility conditions in the North Atlantic.
Anti-Submarine Detection
Between 1939 and 1943, German U-boats have a clear advantage over Allied escort ships. They can close in on convoys without being detected, fire torpedoes and escape without too much difficulty. To counter their devastating attacks, Allied scientists will develop underwater (ASDIC) or surface (radar) detection systems. Other systems can follow U-boats by plotting their radio signals on a map (HF/DF). Finally, the breaking of the Enigma code used for communications between U-boats and their HQ will allow Allied naval authorities to foresee and counter their attacks. It is only in 1943, though, that the Allies, with more ships, better armament and better detection systems will be able to regain control of the seas. (Data courtesy of the Juno Beach Centre)
ASDIC
The ASDIC is a sonar system for submarine detection developed by British, French and American scientists during WWI; the name is derived from that of the Anti-Submarine Detection Investigation Committee.
The ASDIC emits a sound signal at regular time intervals. The sound waves travel through water and, when they hit a solid body, bounce back as an echo, which is intercepted, amplified and then heard by the operator. The return sound wave also sets in motion a stylus that records the echo on a chart. Position is estimated based on the direction of the echo, and distance based on the delay between emission and interception. The operator will immediately notify the bridge of any suspicious reading.
ASDIC sound impulses use a frequency between 14 and 22 kilocycles; the operator of each ship in a convoy must select a frequency different from that used by the neighbouring vessels; otherwise he could intercept the original signal from another ASDIC, resulting in a very loud “ping”. The transmitter is located in a dome under the hull and the signal is sent forward. In 1940, ASDIC detection could locate a submarine, a whale or a school of fish at a distance of 2,000 metres.
The ASDIC system has its limitations: it is affected by the turbulence created by propellers or by the motion of ships; it becomes inefficient, therefore, once the submarine has succeeded in slipping inside the convoy. In addition, when there are layers of water of contrasting temperatures, the signal is deflected and readings are unreliable, as Canadian operators realized when tracking German submarines in the Gulf of St. Lawrence.
Radar
Radar (RAdio Detection and Ranging) emits radio waves that are reflected by solid objects and intercepted on their way back to their source. An amplified image of the echo is displayed on a cathode-ray screen, and the operator can estimate direction and distance. The radar had such potential that Allies and enemies each developed their own top-secret radar projects.
When the war started, the Royal Air Force (RAF) already had a radar system for coastal defence, which was used successfully during the Battle of Britain in 1940. It is only with the development of radars using shorter wavelengths and smaller antennas that those devices could be installed on ships. In 1940, the Royal Navy started using ASW (Air/Surface Warning) systems, also known as Model 286, radars with a 1,5 m-wavelength. Canada’s National Research Council (NRC) soon developed a similar model, called SW1C (Surface Warning 1st Canadian), using the same wavelength, and gradually installed on board of Royal Canadian Navy (RCN) ships, starting in late 1941. Unfortunately, their efficiency in anti-submarine warfare was limited as the wavelength used by both 286 and SW1C radars is still too long to detect an object as small as a submarine’s conning tower.
British scientists countered this limitation by developing the cavity magnetron that can reduce a radar wavelength to 10 cm. As early as 1941, Royal Navy vessels are equipped with this improved radar, Model 271. This development was such a technical breakthrough at the time that Canada’s NRC was unable to come up rapidly with a Canadian version. The RCN will benefit from this upgrade only in 1943 and 1944, long after its British counterpart.
HF/DF (Radio-goniometry)
Starting in 1942, British escort ships were equipped with compact, high-frequency radio-goniometry systems known as “HF/DF” (High Frequency Direction Finder), or “Huff-Duffs”. Just like land-based radio-goniometry stations, HF/DFs allow an operator to determine the direction of a radio signal. An experienced operator can also estimate the distance. When a radio message from a U-boat is intercepted, a ship can be detached from the escort group and sent in the direction of the submarine. Two ships using Huff-Duffs and working together can pinpoint the position of a U-boat through triangulation of their results.
Radio-goniometry is extremely effective in locating German submarines, since when preparing an attack, they must report their position and that of their target to their HQ. Even if the message itself is enciphered it can reveal the position of the attacker.
Enigma/Ultra
Throughout the war, U-boats used radio communications to report their positions and the position of their targets to their HQ. This is how Admiral Karl Donitz could command the submarine fleet as a whole, forming “wolf packs” to attack convoys. Those communications were encrypted through a system code-named Enigma, using a typewriter-like machine that produced enciphered messages that could only be read by someone using another such machine.
Before the war British authorities already knew about Enigma and how Polish scientists had started working on the problem. British intelligence services launched the Ultra Project, a team of cryptography experts located in Bletchley Park, north of London, and dedicated to breaking the coded messages of the German Luftwaffe (air force) and Kriegsmarine (war navy), that the Allies intercepted.
On May 8th, 1941, a German submarine, U-110, was rammed by HMS Bulldog. The crew evacuated the submarine, but she did not sink as fast as her commander thought she would and the Allies were able to seize her Enigma machine with its operating instructions. This allowed Ultra scientists to break the code used by the Kriegsmarine. The British could now be informed within 48 hours on the position, condition and strategy of all German submarines and warships; convoys could be routed to avoid U-boat concentrations.
This remarkable advantage was lost in February 1942, when the Germans upgraded Enigmaby adding a fourth rotor. For ten months, while cryptologists worked on breaking the new code, the Allies were deprived of the valuable information that allowed them to escape U-boats. To make things worse, the Germans succeeded in breaking the No. 3 Code used by the Allies for coordinating convoys and their escort ships. Allied losses in 1942 and early 1943 were staggering.
In the spring of 1943, with the decipherment of the new Enigma system by Bletchley Park and improved detection systems, the Allies gained a decisive advantage. (http://www.junobeach.org/canada-in-wwii/articles/anti-submarine-detection/)

(Author Photo)
German Enigma encryption machine in the Canadian War Museum, Ottawa, one of two collected at Wilhelmshaven in 1945.
The Enigma machine is a cypher device developed and used in the early-to mid-20th century to protect commercial, diplomatic, and military communication. It was employed extensively by Germany during the Second World War in all branches of the German armed forces. The Germans believed, erroneously, that use of the Enigma machine enabled them to communicate securely and thus enjoy a huge advantage during the war. The Enigma machine was considered to be so secure that even the most top-secret messages were enciphered on its electrical circuits.
Enigma had an electromechanical rotor mechanism that scrambled the 26 letters of the alphabet. In typical use, one person entered the text on the Enigma's keyboard and another person writes down which of 26 lights above the keyboard lit up each time a key was pressed. If plain text is entered, the lit-up letters were the encoded cypher text. Entering cypher text transformed the message back into readable plain text. The rotor mechanism changed the electrical connections between the keys and the lights with each keypress. The security of the system depended on a set of machine settings that were generally changed daily during the war, based on secret key lists distributed in advance, and on other settings that were changed for each message. The receiving station had to know and use the exact settings employed by the transmitting station to successfully decrypt a message.
While Germany introduced a series of improvements to Enigma over the years, and these hampered decryption efforts to varying degrees, they did not prevent Poland from cracking the machine code prior to the war, enabling the Allies to exploit Enigma-encyphered messages as a major source of intelligence. It has been suggested by a number of historians that the flow of Ultra communications intelligence from the decryption of Enigma, Lorenz, and other ciphers, shortened the war substantially, and might even have altered its outcome. (Wikipedia)
The allied success at reading German Enigma messages is often praised as shortening the war. However, we don’t often consider how effective the German’s were in reading allied radio traffic - and the cost in allied lives. The book by Christian Jennings, The Third Reich Is Listening. Inside German codebreaking 1939-45, (Osprey Publishing, 23 Oct 2018), gives some details on how U91 was steered, by signals intelligence, onto the ON-127 convoy which HMCS Ottawa was escorting and has a graphic telling of her sinking - from the perspective of a RCN officer who was onboard. (Jamie McCaffrey)
The German B-Dienst had broken the British Naval and merchant marine codes and knew the convoy routings and the moves taken by British anti-submarine escort squadrons.
The Germans had successfully broken the codes for the convoys and escorts - for some time. A fact which was admitted to be known at the Board of Inquiry into HMCS Ottawa’s sinking. The Germans developed a thorough assessment of British and American air force units throughout England and could predict with reasonable accuracy when a bombing operation would be undertaken and its likely target. They also made a very good forecast of the likely point and timing of the Normandy invasion based on intercepts and analysis of US and RAF squadron and group deployments. (Byard B)
ASDIC, RADAR and IFF SYSTEMS as used by the RCN: WWII and Post War
Developed by: Jerry Proc
Last updated : August 18/22
http://jproc.ca/sari/
http://jproc.ca/haida/asdic_sonar_sys.html
https://uboat.net/allies/technical/asdic.htm
https://en.wikipedia.org/wiki/List_of_British_Asdic_systems
https://www.liverpoolmuseums.org.uk/asdic-underwater-ear
